
www.engineering-china.com
11
'22
Written on Modified on
自主导航 – 精确到毫米
在物联网(IoT)和工业4.0(Industry 4.0)时代内部物流发挥着越来越重要的作用。对货物和材料进行精确运输将成为高效生产的关键因素。由Evocortex公司研发的移动运输系统通过与众不同的方式完成此任务。在实现他们的创新技术方案过程中,具有高功率密度的FAULHABER电机也起到了决定性作用。

在今天,“生产”似乎已经成为“复杂性”的代名词。越来越多的产品需要根据客户的特殊要求来生产。通过应用IoT技术,即使是极小的批量,甚至单个工件,也能够实现全自动生产。多变的参数需要工艺过程之间的紧密衔接,同时还要保证高度的灵活性。在零部件参数变化无止境的情况下,还必须保证正确的部件在正确的时间到达对应生产工位。
AMR技术大步向前
原材料输送(比如从供应点到生产设备之间)的个性化要求越来越高,与此同时该过程还需要尽可能实现自动化。因此可移动机器人平台,即所谓的自主可移动机器人(AMR)在全球各地的仓库和生产车间得到越来越广泛的应用。
位于德国纽伦堡的初创企业Evocortex公司成立于2016年,由经验丰富的机器人技术专家创建,专注该市场。与纽伦堡技术研究机构(纽伦堡工业大学)以及其它教育和科研部门紧密合作,该公司凭借全新AMR方案打入市场。该公司提供的创新产品方案符合现代化物流的技术要求。
“传统的AMR通常需要对应用场地的空间进行调整,比如运行轨道,或者甚至需要对工艺过程进行技术调整,”总经理Hubert Bauer解释道。“比如必须安装用于车辆定位的光学标记,路径和交叉口必须符合规定的尺寸以及弧线半径。我们的宗旨正好与此相反,我们要打造能够适应客户需求的输送机器人。”

通过车间地面的“指纹”实现精确定位
Evocortex公司的自主移动式机器人(AMR)不需要预转导向系统来实现定位。它们可以通过车间地面的不规则特征实现定位。即使在常见的混凝土地面上,机器人也能够通过高分辨率照相机确定地面的不规则特征。照相机安装在运输车底侧,对10x10厘米的地面区域进行拍照,并通过图片数据创建车间地面的“指纹”。在这个新颖独特的系统背后,Evocortex自行研发的Localization Module (ELM)发挥了关键作用。
在最初的示教过程中,机器人按照网格图案在车间地面上运行。借助复杂的算法,它可以通过不同位置的图形绘制出高度精密的地图。在未来,还可通过自学式人工智能来完成这一步。除此之外,控制器可以检测到小车的移动过程。通过数据组合,它可以在一平方公里的理论区域内实现毫米级别的定位精度。为此,机器人只需要对三个点进行识别。即使有50%的地面被切屑覆盖,ELM模块仍然不受影响,保证完成精确导航。出现在地面上的永久性划痕将被添加到地图上,消失的地面特征也将在一定时间后被从地图上清除。
此外还可以为AMR机器人在一个或两个端面安装LIDAR传感器。它们可以在行驶方向进行空间扫描和障碍物识别,其中包括移动的物体,比如穿过运行道路的人。运输车立即停止,以确保工作人员的安全。

通过麦克纳姆轮实现无限制可移动性
普通车轮只能按照轮轴转向移动。采用这类车轮的车辆如果需要精确定位,就必须完成类似于停车时的操作。为了避免这个情况,Evocortex公司的研发人员决定采用麦克纳姆轮。它与普通车轮的环绕式运行表面不同,而是在轮毂上装有多个筒形辊轮。它们与车轮轴形成45度角,可以围绕自己的轴承轴旋转。通过选择辊轮的形状、尺寸和间距,即可实现车轮的连续滚动面。
麦克纳姆轮转动时产生两个力,一个沿着车轮的旋转方向,另一个则与车轮的旋转方向形成一个角度。最终的运动方向正好位于两者之间,麦克纳姆轮总是沿着与轴向成45度角的方向运动。由于辊轮具备可移动性,因此车轮的方向不稳定。如果受到其它的作用力,车轮的运动方向可能发生任意改变。
在安装了四个麦克纳姆轮的车辆上,如果将每个车轮的45度运动方向都偏移90度角,那么每个车轮都朝着相反的方向运动。通过调整单个车轮的旋转方向和速度,即可控制处于静止状态的车辆朝任何方向运动,或在原地旋转。在水平面上,它就可以像气垫车一样完全自由移动。也就是说,麦克纳姆轮让机器人可以完成灵活的全方位移动。
可达到毫米级别的精确度
Evocortex公司的AMR机器人还具有另一个出色的灵活性,那就是它的尺寸不受任何限制。“我们可以根据用户的需要以毫米为单位对机器人进行调整,”Hubert Bauer进一步强调。“任何外部尺寸只要在在400x800和800x1200毫米的范围内都可以得到实现。”EvoRobot R&D 和 EvoRobot Industrial系列产品的尺寸几乎与承载平台的外部尺寸相等。所有的技术部件——传感器、控制器、提升单元和车轮驱动装置都安装在平台下方。
车轮驱动模块是实现可扩展性的关键因素。它直接安装在车轮上方,与车轮共同构成一个标准化的独立功能单元。这样一来,车轮的安装间距就不受到限制。功率大,尺寸小的电机在实现此技术要求上起到了决定性作用。
“为了找到最适合的电机,我们对市面上的产品进行了仔细审核,”Hubert Bauer在回忆研发阶段的情况时说道。“只有FAULHABER的产品才具备我们需要的功率密度。其它厂家的电机如果能够达到我们要求的转矩,体积都太大。”

功率大,体积小
EvoRobot 的车轮模块安装了3257… CR或3272…CR系列有刷电机。每台电机都配备一个IEF3编码器和38/2S减速箱。为了实现快速停止以及确保车轮停止后能够锁定,车轮电机还配有制动器。“依靠这些强大动力的微电机,EvoRobot的载重量最高可达200公斤。不用很长时间我们还将推出载重量更大的型号,”Huber Bauer解释道。“在不超过5度的斜坡上,它还能够以每秒一米的速度载重行驶。”
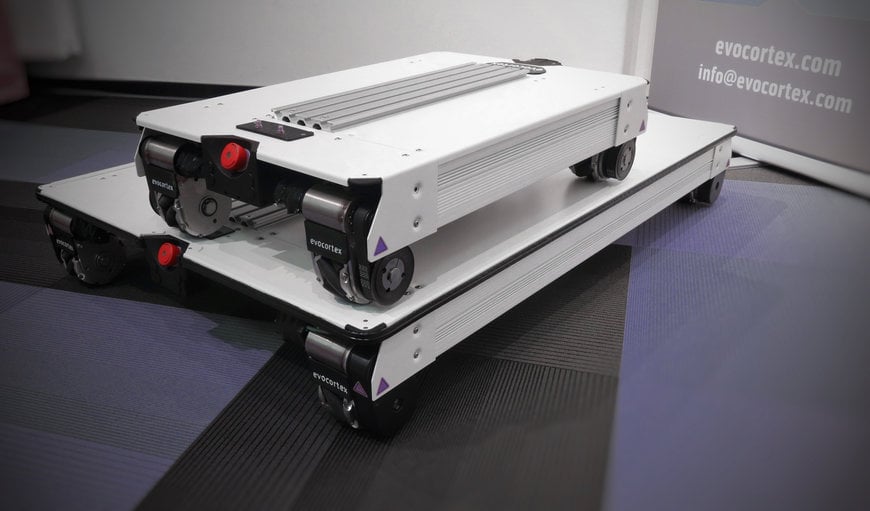
EvoCarrier 产品主要用于小负载托盘的运输。这款AMR机器人的内部空间与EvoRobot相比更加紧凑。它的离地间隙还不到100 mm,因此可以行驶到离地面比较近的货物下方。两台或者四台EvoCarrier可以用来搬运托盘或者整个货架。研发人员选择了所谓的“扁平转子电机”——也就是长度仅21毫米的4221… BXT系列无刷电机作为驱动。EvoCarrier可以用来搬运装载总重量不超过120公斤小负载托盘的辊轮货架。公司总经理认为,从长远角度看,EvoRobot机器人也会改用无刷电机,而且模块会进一步实现标准化。
除了功率和体积比以外,零维护和持续工作可靠性在AMR运行方面也起重要作用。“在使用寿命方面FAULHABER电机超越了我们的期待,”Hubert Bauer说道。“不仅如此,这些驱动装置还可以和普通工业控制器组合。FAULHABER公司的专家们也积极配合我们,为量产找到最佳的参数设置。”
